

Dynamic threshold analysis method of early warning and forecast based on real-time geo-hazards monitoring data
-
摘要: 目前在地质灾害监测领域,监测预警信息的发布主要基于各类监测设备的阈值设定。阈值是根据经验或专家估计设定,不仅对地质灾害不同类型、不同环境缺乏针对性,而且设定后较长时间不变,或根据经验略微浮动,缺少数据样本分析的科学性。另外监测设备容易受到卫星信号等环境因素影响,因此在实际运行中可能会出现误报、漏报的情况。为了解决上述问题,文中提出了一种预警阈值自学习自修正从而进行动态调整的方法,引入了两种可变阈值,并提出了一种基于优先级和门以及半马尔可夫过程 VTAS的性能指标优化新方法。半马尔可夫过程的应用使该方法能够考虑具有非高斯分布的工业测量。此外,文中还提出了一种基于遗传算法的优化设计过程,用于优化参数设置,提高性能指标。通过数值仿真以及与以往研究的比较,说明了该方法的有效性。将该方法在实测点位上进行应用,根据结果可知,相比于使用固定阈值,该方法能有效地减少系统误报、漏报,提高地质灾害预警的准确性,从而更好地保护人民生命财产安全。Abstract: Currently, in the field of geological disaster monitoring, monitoring and early warning information is mainly released based on the threshold setting of various types of monitoring equipment. However, since the thresholds are established according to empirical values or expert evaluations, there is a lack of pertinence to different types of geological disasters and different environments. Once set, these thresholds remain unchanged for a long time, and even when adjusted, they only slightly float based on experience, lacking scientific data sample analysis. Additionally, monitoring equipment is susceptible to satellite signals and environmental factors, leading to false alarms and false negatives during operation. To address these issues, a method of dynamic adjustment of self-learning and self-correction early warning thresholds is proposed. This method introduces two variable thresholds and a new performance index optimization method for VTAS based on priority and gate and semi-Markov processes. The application of the semi-Markov process allows the method to consider industrial measurements with non-Gaussian distributions. Moreover, an optimization design process based on genetic algorithms is proposed to improve performance indicators by optimizing parameter settings. Three numerical examples are used to illustrate the effectiveness of this approach and compare it with previous studies. When applied at the measured point, the method effectively reduce false alarms and under-alarms compared to the use of fixed thresholds, improving the accuracy of geological disaster early warning and better protecting the safety of people's lives and property.
-
0. 引言
我国西南地区山地范围广,地形地貌复杂,地质构造运动活跃,早期多次强震导致岩体破碎,产生了大量松散固体物质,加之山区降雨充沛且较为集中,为泥石流的形成和发育提供了极为有利的条件[1 − 3]。泥石流是水与细颗粒组成的液相和砂石组成的固相物质的两相流[4 − 5],是山区常见地质灾害类型之一,具有暴发突然、运动速度快、危害范围广等特点[6 − 7]。作为一种强烈的地表剥蚀现象,泥石流通常意义上被认为发生在生态环境差、植被覆盖度低的山区,但强震产生的滑坡为泥石流的形成提供了物源基础[8 − 9],使得一些植被覆盖良好的湿润气候地区也会暴发大规模泥石流灾害,这些区域的泥石流在运动过程中还会携带大量漂木,漂木极易在沟道缩窄处堵塞聚集,形成不稳定的漂木堵塞体,堵塞体溃决后会导致泥石流流量急剧增大,加重灾情[10 − 12]。如:2003年7月云南德宏特大泥石流[13],2013年7月四川汶川草坡乡泥石流[14]和七盘沟特大泥石流[15]等,就有大量漂木伴随泥石流的运动倾泻而出,给当地造成严重损失。
以往关于泥石流风险的研究,风险区主要集中在泥石流沟口堆积扇位置[16],而对于泥石流堆积扇外的区域风险研究较少,且通常认为物源主导泥石流风险的放大,泥石流物源量增多,规模增大,风险随之增大[17 − 19]。对于直接汇入干流的支沟泥石流,除了在泥石流堆积扇范围内受灾外,有时还会联系着干流的堰塞和洪水灾害。如:2010年8月12日,四川省绵竹市清平乡文家沟暴发特大泥石流[20],泥石流冲入绵远河后将主河局部堵塞,导致河流改道淹没了下游右岸的大量房屋,形成的堰塞湖回水淹没上游道路、民房等基础设施,最终造成5人遇难、1人失踪。对于陡峭的河谷地区,桥涵是公路工程中的重要结构,但其在方便人们交通出行的同时也会增大泥石流灾害风险。具体来说,公路桥涵的设计通常会考虑正常的水流和气候条件,但在遭遇泥石流灾害时,特别是对于一些植被覆盖良好的地区,泥石流汇入主河后不仅会影响河道形态和泥沙供应,同时也会将沿途刮铲的漂木引入河道,漂木在遇到桥涵或河流断面狭窄处极易造成堵塞,引发上游水位上涨,增大邻近地区洪水淹没风险[21 − 23]。
2020年8月17日,在连续多日强降雨的影响下,四川省平武县亚者造祖村暴发了大规模群发性泥石流灾害,导致G247国道多处断道和垮方,九绵高速项目部、民工驻地等多处遭受巨大损毁。泥石流汇入主河后,由泥石流裹挟的大量漂木将下游正在修建的高速公路桥涵堵塞,导致主河水流运动受阻回淤,淹没了干流右岸本不在泥石流堆积扇范围内的32户97间居民房屋,扩大了受灾范围。灾害最终造成了4人死亡,直接经济损失达
6000 万元。本文以亚者造祖村“8•17”群发性泥石流为研究对象,探讨了此次群发性泥石流灾害风险特征,并重点分析了干流公路桥涵对泥石流灾害的风险放大效应,旨在为今后类似山区干流公路桥涵的合理规划以及泥石流相关防治预警工作提供参考。1. 研究区概况
平武县位于四川省绵阳市西北部,青藏高原向四川盆地过渡边缘地带,位居长江二级支流涪江上游地区,此次泥石流发生地点为平武县白马藏族乡亚者造祖村,暴发泥石流的4条沟为:阿祖沟、麻石扎三号沟、夺补河五号沟、杂排沟,沟口与九寨沟至绵阳高速公路(以下简称“九绵高速”)和G247国道相交。研究区主要河流为夺补河,发源于王郎自然保护区,全长108 km,总落差为
2485 m,河床平均比降为23‰,平均流量为41 m3/s,平均径流总量为13×108 m3/a,4条泥石流沟分布于夺补河两侧(图1)。区内地形北高南低,最高山顶高程4000 m,谷底高程2200 m,相对高差1800 m。两岸岸坡较陡,呈现出“四周高、中间低”的地形地貌特征,极有利于雨水的汇集和泥石流的形成运移。通过现场调查和遥感解译查明4条泥石流沟地形地貌特征见表1。表 1 研究区4条泥石流沟地形地貌特征参数Table 1. Topographic and geomorphologic characteristics parametes of four debris flow gullies in the study area流域名称 流域面积
/km2主沟长度
/km平均纵
比降/‰最高海拔
/m最低海拔
/m最大高差
/m阿祖沟 4.10 3.10 244 3110 2353 757 麻石扎三号沟 2.43 3.20 294 3302 2361 941 夺补河五号沟 1.80 2.54 311 3147 2357 791 杂排沟 6.16 5.45 223 3543 2330 1213 研究区位于四川盆地与龙门山结合部位,受活动断裂带影响较大,新构造运动强烈,地震频发。区内有松潘—较场地震带和龙门山地震带两条大型断裂构造通过,松潘—较场地震带带内曾发生过7级以上地震4次,最大为1933年茂县叠溪7.5级地震;2008年5月12日在龙门山中岩断裂发生的8.0级汶川特大地震,平武县境内沿断裂沿线的平通—响岩—南坝—石坎一线成为极震区[24],2017年8月8日发生在阿坝州九寨沟县的7.0级地震对研究区也产生了极大影响。早期频繁的地震活动,导致区内地层遭受强烈切割挤压而破碎,山体稳定性遭到严重破坏,产生了大量松散固体物质,为泥石流的形成提供了极为丰富的物源条件[25]。
研究区属亚热带季风气候区,降雨充沛且较为集中,多年平均降雨量为806.0 mm,降雨最多的是
1155.4 mm(1955年),最少的是480.8 mm(1986年),月最大降雨量为442.5 mm(1976年8月),日最大降雨量为151 mm(1993年5月27日),时最大降雨量为72.7 mm(1993年5月27日19时),10分钟最大降雨量为30.0 mm(1993年5月27日19时27分),降雨雨强大是引发区内泥石流灾害发生的重要因素(图2)。根据平武县气象局提供资料显示,2020年8月10日20时—8月17日14时,平武县白马藏族乡累计降雨量为250.20 mm,比常年8月份同比增加219.95 %,结合历史降雨资料对比,此次降雨强度超50年一遇。2. 数据来源与方法
2.1 数据来源
本研究数据包括:像元分辨率为12.5 m×12.5 m的研究区ALOS(advanced land observation satellite)DEM数据(https://search.asf.alaska.edu/#/),作为Fast Flood模拟时的基础地形数据;从美国地质调查局(USGS)下载的研究区2020年7月19日(灾前)和2020年8月20日(灾后)的Landsat系列遥感影像(分辨率15 m),用于研究区灾害前后植被覆盖度的提取。为了获取亚者造祖村“8•17”群发性泥石流灾害基本特征,灾后(2022年5月)对研究区开展了详细野外调查。调查时通过选取沟道内典型断面确定泥石流最大泥痕高度(泥深)以及顶部和底部断面的宽度,同时调查了泥石流的危害形式、建筑物破坏、沟道侵蚀、桥涵堵塞情况等。另外,在4条泥石流沟堆积扇位置采集了泥石流样品,对粒径小于60 mm的堆积物进行颗粒级配分析。最后,通过对当地灾害目击者的访谈,了解了泥石流历史及灾害现场的基本情况。
2.2 参数计算
2.2.1 泥石流容重
通过室内物理筛分与马尔文试验测量野外调查时采取的泥石流堆积样品中的黏粒含量,试验结果如图3所示。4条沟泥石流容重采用基于黏粒(粒径<0.005 mm)含量的容重计算法[26]确定:
(1) 式中:
2.2.2 泥石流流量
根据水源条件,4条泥石流沟均为暴雨型泥石流,通过查询《四川省中小流域暴雨洪水计算手册》中的降雨量等值线图,分别获取研究区1 h和6 h平均雨强(
(2) 式中:
一次泥石流过程总量和一次泥石流冲出固体物质总量采用《泥石流灾害防治工程勘查规范(试行)》(T/CAGHP 006—2018)中推荐的公式[27]计算:
(3) (4) 式中:
野外调查时通过选取4条泥石流沟泥痕相对清晰的位置进行断面测量,确定泥石流最大泥痕高度(泥深)以及顶部和底部断面的宽度,采用形态调查法[27]计算泥石流洪峰流量:
(5) 式中:
2.3 泥石流堵河分析
根据陈德明堵河判别公式[28],对研究区4条泥石流沟堵河程度进行计算。当
(6) 式中:
2.4 Fast Flood模拟
本文运用Fast Flood模型模拟干流有桥涵和无桥涵两种情况下洪水淹没情况,该模型主要控制方程如下:
(7) (8) (9) (10) (11) 式中:
R——降雨率;
h——水流高度/m;
g——重力加速度/(m·s−2)。
3. 结果与分析
3.1 泥石流规模特征
亚者造祖村“8•17”泥石流为低频稀性大规模群发性泥石流。根据对当地村民(46岁)的调访,并结合其回忆父母曾给予的泥石流相关活动信息,该村民表示研究区1976年发生“松潘—平武”地震后,在强降雨作用下暴发过一次特大泥石流灾害,直至2020年没有暴发过其他泥石流。同时,结合雨洪法和形态调查法计算结果(表2,表3),判断此次群发性泥石流暴发频率约为50年一遇。根据泥石流相关运动特征计算结果,阿祖沟、麻石扎三号沟、夺补河五号沟、杂排沟泥石流容重分别为:1.68 g/cm3、1.71 g/cm3、1.65 g/cm3、1.61 g/cm3,均小于1.80 g/cm3,为稀性泥石流。根据《泥石流灾害防治工程勘查规范(试行)》(T/CAGHP 006—2018)[27]中的泥石流规模等级分类,按雨洪法计算得到的4条泥石流沟50年一遇峰值流量结果,麻石扎三号沟和夺补河五号沟泥石流峰值流量分别为134.97 m3/s和108.46 m3/s,在规模上属大型;阿祖沟和杂排沟泥石流峰值流量分别为232.71 m3/s和218.44 m3/s,在规模上属特大型。
表 2 研究区4条泥石流沟雨洪法相关参数计算结果Table 2. Calculation results of storm flood method related parameters in four debris flow gullies in the study area流域 P/% 阿祖沟 1 0.91 0.97 0.8 59.20 2.8 63.26 302.82 19.19 7.91 2 0.90 1.01 0.8 51.60 2.6 52.35 232.71 14.74 6.08 5 0.87 1.08 0.79 42.00 2.4 39.16 160.70 10.18 4.20 麻石扎三号沟 1 0.94 1.07 0.8 59.20 2.8 35.57 174.58 8.30 3.57 2 0.93 1.12 0.8 51.60 2.6 29.61 134.97 6.41 2.76 5 0.91 1.19 0.79 42.00 2.4 22.41 94.27 4.48 1.93 夺补河五号沟 1 0.94 0.90 0.8 59.20 2.8 30.42 140.24 6.66 2.63 2 0.93 0.94 0.8 51.60 2.6 25.33 108.46 5.15 2.03 5 0.92 1.00 0.79 42.00 2.4 19.19 75.84 3.60 1.42 杂排沟 1 0.93 1.58 0.8 59.20 2.8 65.48 282.62 17.91 6.30 2 0.92 1.65 0.8 51.60 2.6 54.50 218.44 13.84 4.87 5 0.90 1.76 0.79 42.00 2.4 41.17 152.30 9.65 3.39 注: 流域 阿祖沟 1.15 1.68 2.0 41.00 8.40 344.39 16.37 6.79 麻石扎三号沟 1.37 1.71 2.2 16.28 9.64 156.86 7.45 3.20 夺补河五号沟 0.82 1.65 1.7 13.86 8.77 121.47 5.77 2.27 杂排沟 0.52 1.61 2.0 21.76 8.51 185.18 11.73 4.12 注:R为水力半径。 3.2 泥石流成灾特征
亚者造祖村“8•17”群发性泥石流灾害风险沿干流两岸呈星扇状分布,干流公路桥涵堵塞致使风险范围扩大了约1倍。研究区地处河谷地带,地形狭窄,真正适宜居住的“开阔平地”极少,受地形条件限制,九绵高速项目部将临时驻地修建在地势相对平缓的老泥石流堆积扇上,由于研究区植被覆盖度较高、泥石流隐蔽性强,忽视了泥石流的危害。2020年8月17日,阿祖沟、麻石扎三号沟、夺补河五号沟、杂排沟不同程度地暴发泥石流,其中,阿祖沟泥石流规模及其造成的损失最为巨大。结合现场调查和遥感解译结果,阿祖沟泥石流堆积扇面积约为5.95×104 m2,堆积高度约为2.5 m,堆积体积为14.88×104 m3,阿祖沟泥石流发生后,直接将位于沟口正下方的项目驻地夷为平地,民工驻地和钢筋加工中心遭到严重损毁(图4)。夺补河五号沟泥石流堆积扇面积约为3.43×104 m2,堆积高度约为1.3 m,堆积体积为4.45×104 m3,其危害对象主要为九绵高速预制梁场、拌合站以及白马隧道洞口驻地。此次群发性泥石流灾害造成了4人死亡,九绵高速项目部直接经济损失达
3000 万元(表4)。此次群发性泥石流具有极其强大的搬运能力和冲击力,泥石流在运动过程中不断沿途掏蚀沟床松散堆积物,侵蚀两岸坡脚,致使其流量、规模不断扩大,4条泥石流沟分布在干流两侧,群发性泥石流灾害风险沿干流两岸呈星扇状分布。![]() 图 4 阿祖沟堆积扇位置受灾前后对比Figure 4. Comparison of accumulation fan positions in Azu debris flow gully before and after the disaster表 4 研究区4条泥石流沟堆积扇特征及危害对象Table 4. Characteristics and vulnerable objects of accumulation fans in four debris flow gullies in the study area
图 4 阿祖沟堆积扇位置受灾前后对比Figure 4. Comparison of accumulation fan positions in Azu debris flow gully before and after the disaster表 4 研究区4条泥石流沟堆积扇特征及危害对象Table 4. Characteristics and vulnerable objects of accumulation fans in four debris flow gullies in the study area流域 堆积扇面积/(104 m2) 平均堆积厚度/m 堆积体积/(104 m3) 主要危害对象 阿祖沟 5.95 2.5 14.88 九绵高速项目部驻地、民工驻地、钢筋加工中心 麻石扎三号沟 3.14 1.5 4.72 G247国道 夺补河五号沟 3.43 1.3 4.45 九绵高速预制梁场、拌合站、白马隧道洞口驻地 杂排沟 4.14 2.3 9.52 G247国道、在建九绵高速、沟口民宿 根据陈德明等[28]堵河判别公式计算结果(表5)以及结合现场实际调查情况,泥石流冲出沟口汇入主河后,并未直接造成干流堵塞,因此,不存在堰塞湖及其溃决洪水对下游造成威胁。正常情况下,4条泥石流沟仅在其堆积扇范围内构成危害,受灾面积共计约为16.66×104 m2。但实际调访时了解到此次群发性泥石流除了在堆积扇范围内受灾外,堆积扇外距离杂排沟沟口约300 m处的下游村庄也遭受了严重影响(图5)。
表 5 泥石流堵河相关参数与计算结果Table 5. Related parameters and calculation results of debris flow blocking river流域 J/‰ 堵河情况 阿祖沟 232.71 1.68 8.40 60 244 1.19 不堵 麻石扎三号沟 134.97 1.71 9.64 120 294 0.81 不堵 夺补河五号沟 108.46 1.65 8.77 80 311 0.65 不堵 杂排沟 218.44 1.61 8.51 120 223 1.09 不堵 泥石流发生时,杂排沟沟口下游约有500 m的公路距离和干流方向基本一致,九绵高速公路路基宽24.5 m,每个桥涵由6个桥墩构成,桥墩直径为1.2 m,桥墩之间的轴向间距为3 m。干流河道平均宽度为21 m,多个桥墩直接修建于主河道内,大大减小了河道有效流动面积,加之上游大量漂木运动到桥涵位置后因受阻而不断汇聚造成堵塞,导致主河水流运动受阻回淤,受灾面积扩大了约16.78×104 m2,风险范围扩大了约1倍。
3.3 漂木堵塞公路桥涵导致泥石流灾害风险放大
亚者造祖村“8•17”群发性泥石流冲出物中的大量漂木汇入主河道引起的次生灾害是导致泥石流风险进一步放大的重要原因。根据调访现场村民,其表示在泥石流发生前,研究区已连续降雨长达一个月之久,8月17日之前,洪水均能通过干流河道顺流而下,并未出现溢流情况。泥石流发生后,由于泥石流裹挟的大量漂木汇入主河运动到下游公路桥涵位置后因受阻而不断汇聚造成堵塞,形成堰塞体,引发主河回淤—漫坝—溢流,导致干流右岸本不在泥石流堆积扇范围内的32户97间居民房屋受损,约2.4×104 m2农作物受灾,直接经济损失增加了
3000 万元,扩大了此次群发性泥石流灾害范围,放大了泥石流灾害风险(图6)。![]() 图 6 干流桥涵堵塞回水淹没村庄示意图Figure 6. Schematic diagram of village inundation due to backwater from main stream bridges and culverts blockage
图 6 干流桥涵堵塞回水淹没村庄示意图Figure 6. Schematic diagram of village inundation due to backwater from main stream bridges and culverts blockage漂木堵塞干流公路桥涵后带来的风险放大效应主要体现在两个方面:(1)堰塞现象带来的风险放大效应。泥石流运动过程中裹挟的漂木汇入干流后在桥涵处积聚,形成堰塞体,大大减小河道有效流动面积,导致水流运动受阻,泄流能力降低,引发上游洪峰高度上升,增大邻近地区洪水淹没风险。亚者造祖村“8•17”群发性泥石流灾害就是干流桥涵的堰塞现象导致灾害风险放大的一个典型例子。(2)结构破坏带来的风险放大效应。干流公路桥涵通常能承受正常的水流冲击,但在山洪、泥石流发生时,庞大的冲击力可能超出桥涵设计承载能力,加之大量漂木、石块等堆积在干流桥涵位置会对桥涵结构施加额外的作用力,加剧桥墩周围的局部冲刷,可能会导致桥涵的破坏甚至垮塌,进一步加剧灾害风险。“8•17”泥石流发生后,九绵高速项目部及时将主河进行了改道(图7),并对河道的宽度及坝高进行了一定程度的改进,可避免再次发生泥石流时因下游桥涵堵塞而加剧灾情。
![]() 图 7 干流公路桥涵与主河位置注:a为主河改道前;b为主河改道后。Figure 7. Location of road bridges and culverts with respect to main river
图 7 干流公路桥涵与主河位置注:a为主河改道前;b为主河改道后。Figure 7. Location of road bridges and culverts with respect to main river野外调查时发现了大量堆积于泥石流沟道内的漂木(图8),堆积漂木的形状和尺寸较为复杂,有单纯主枝干,也有带分枝或根系等相对复杂的漂木,基本形状普遍为长条形圆柱状,堆积漂木尺寸大约在0.3~3.5 m不等,直径大多在5~40 cm范围之内。为了对比泥石流发生前后流域内植被变化,通过美国地质调查局(USGS)下载了研究区2020年7月19日(灾前)和2020年8月20日(灾后)Landsat8 OLI遥感影像(分辨率15 m),并基于ENVI 5.3软件计算得到研究区泥石流发生前后的归一化植被指数(NDVI)(图9)。结果显示,泥石流发生前流域内植被覆盖度较高,导致泥石流隐蔽性强。前期长历时强降雨使得大量植被失稳滑动,加之泥石流运动过程中不断沿途刮铲,沟道内的树木植被遭到严重破坏,使得大量漂木成为了此次泥石流灾害的一部分物源。基于灾害前后植被覆盖度,利用ArcGIS计算得到4条泥石流沟灾后植被损毁面积共计约1.38 km2,计算过程可能与实际过程存在一定偏差,但泥石流发生后大量植被损毁,漂木含量增大趋势明显。
![]() 图 8 野外调查时沟道内堆积的大量漂木Figure 8. Driftwood accumulated in debris flow gully during field survey
图 8 野外调查时沟道内堆积的大量漂木Figure 8. Driftwood accumulated in debris flow gully during field survey![]() 图 9 4条泥石流沟植被覆盖度对比Figure 9. Comparison of vegetation coverage in four debris flow gullies
图 9 4条泥石流沟植被覆盖度对比Figure 9. Comparison of vegetation coverage in four debris flow gullies3.4 基于Fast Flood模拟桥涵堵塞过程分析
本文运用Fast Flood模型模拟了干流有桥涵和无桥涵两种不同情况下的洪水淹没情况。首先导入像元分辨率为12.5 m×12.5 m的研究区DEM数据,对导入的地形数据进行土地利用和渗透分析,根据灾害发生时河道实际情况,绘制了宽21 m、高3.5 m的河道,最后输入河流流量和降雨数据,模拟干流在没有桥涵的情况下洪水运动过程。基于上述步骤,在干流河道内桥涵堵塞位置设置宽23 m、高6 m的坝体,模拟干流在有桥涵且被堵塞的情况下洪水运动过程,模拟结果如图10所示。
![]() 图 10 Fast Flood模拟结果注:a为干流无桥涵时淹没范围;b为干流有桥涵时淹没范围;c为淹没范围对比。Figure 10. Comparison of Fast Flood simulation results
图 10 Fast Flood模拟结果注:a为干流无桥涵时淹没范围;b为干流有桥涵时淹没范围;c为淹没范围对比。Figure 10. Comparison of Fast Flood simulation results从图10a可以看出,在无桥涵的情况下,水流会沿着河道顺流而下,河道内水流深度为2.4 ~3.2 m,出现了轻微溢流,溢流深度为0.4 ~0.6 m,溢流面积约为0.91×104 m2。从图10b看出,在有桥涵堵塞的情况下,由于水流运动受阻,出现大面积回淤,淹没了干流右岸大部分房屋。亚者造祖村水流淹没深度为1.3 ~2.5 m,与无桥涵时相比,淹没范围扩大了约13.98×104 m2。根据调访及灾害现场村庄淹没情况,洪水流经亚者造祖村时的水位高度约为1.6 ~2.8 m,受灾面积为16.78×104 m2。由于模拟时只考虑了研究区洪水淹没情况,实际上在泥石流冲出沟口后,会有一部分固体物质汇入主河,致使河床有所抬升,因此,模拟结果较实际值偏小,但总体基本吻合,且可以看出在有桥涵堵塞的情况下,灾害风险放大效果明显。
4. 讨论
对于植被覆盖良好的湿润山区,泥石流运动过程中往往会裹挟大量漂木,漂木遇到桥涵等断面缩窄处极易形成堵塞,引发上游水位上涨,加剧灾害风险。根据漂木长度和桥墩间距,桥墩处漂木的堵塞堆积可分为两种不同机制,即单墩堆积和跨距多墩堵塞堆积[29 − 33]。当漂木数量较少且桥墩之间的有效开口(即桥墩之间的距离)大于漂木的最大长度时,就会出现单墩堆积,在此情况下,漂木堆积通常在漂木垂直于水流方向击中桥墩后开始,这种类型的漂木堆积体稳定性不高,容易被后续来流冲溃。跨距多墩堵塞堆积可分为漂木横挡搭桥型堆积和漂木交错咬合型堆积[34 − 35],若桥墩之间的有效开口小于漂木的最大长度,漂木直接被夹在两个或多个桥墩以及桥墩与堤岸之间时,就会形成“漂木横挡搭桥型”堆积,长漂木被拦截横挡于桥墩之间后形成骨架,大大减小桥涵过流断面,也会促进对后续短小漂木的拦截,逐渐形成更大的堵塞体,在桥涵结构未被破坏的情况下,这部分漂木形成的堵塞体将稳定存在,难以发生溃决。若桥墩之间的有效开口大于漂木的最大长度,但由于漂木数量较多,多根漂木同时到达桥涵处时,漂木之间相互咬合成为堵塞体,在两个或多个桥墩之间就会形成“漂木交错咬合型”堆积,在此情况下的漂木堆积体稳定性不高,在形成临时性堵塞后可能会被后续来流冲溃。由于沿河修建的干流公路桥涵的特殊性,堆积堵塞的漂木在发生溃决后,可能又会在下一个桥涵处继续堵塞堆积,形成级联堵塞。干流桥涵堵塞导致主河过流能力大大降低,不仅增大后续漂木堵塞的概率,也会阻碍主河的过流并回淤,使得上游水位不断升高,增大邻近地区洪水淹没风险。
因此,今后干流公路桥涵修建时应适当增大桥墩之间的轴向间距,减小桥涵截面处漂木堵塞概率,或者尽量一桥跨越,使用大跨度的桥,避免在河道内修建多个密集分布的桥墩,要给河道预留出一定的宽度和运行空间。同时,应适当增加河道的坝高和宽度,防止因河道堵塞或干流洪峰过大而增大邻近区域洪水淹没风险。对于区域内漂木的减灾,可以考虑在泥石流沟道内关键断面位置设置相应的漂木拦截措施或在桥涵等处设计漂木导流桩、漂木清除装置[14]等,减少大量漂木的堵塞淤积,并定期对沟道及河道内的漂木进行清理。另外,应对山区低频率老泥石流沟开展严密排查,准确划分泥石流危险区,避免在老泥石流堆积扇上建房,建议对沟道采取“固源+拦挡+排导”的综合防治措施,对不稳定斜坡进行固源处理,在沟道下游修建拦砂坝,拦截流域内主要固体物质,同时可修建连接支沟与干流的排导槽,使拦砂坝排出的细小颗粒可以顺利归流排导。
5. 结论
(1)亚者造祖村“8•17”群发性泥石流具有发生频率低、成灾规模大、隐蔽性强的特征,4条沟泥石流容重均小于1.80 g/cm3,为稀性泥石流,阿祖沟和杂排沟泥石流在规模上属特大型,麻石扎三号沟和夺补河五号沟泥石流在规模上属大型,堆积扇受灾面积共计约为16.66×104 m2,群发性泥石流灾害风险沿干流两岸呈星扇状分布。
(2)早期多次强震和前期长历时强降雨共同促进并激发了此次群发性泥石流的形成,而干流公路桥涵布设不当,导致泥石流裹挟的漂木堵塞桥涵,致使主河回淤—漫坝—溢流,受灾面积增大了16.78×104 m2,风险范围扩大了约1倍。
(3)对于植被覆盖良好的湿润山区,干流公路桥涵修建时应适当增大桥墩之间的轴向间距,或者尽量一桥跨越,使用大跨度的桥,避免在河道内修建多个密集分布的桥墩,要给河道预留出一定的宽度和运行空间,防止因漂木堵塞桥涵放大泥石流灾害风险。
-
![]()
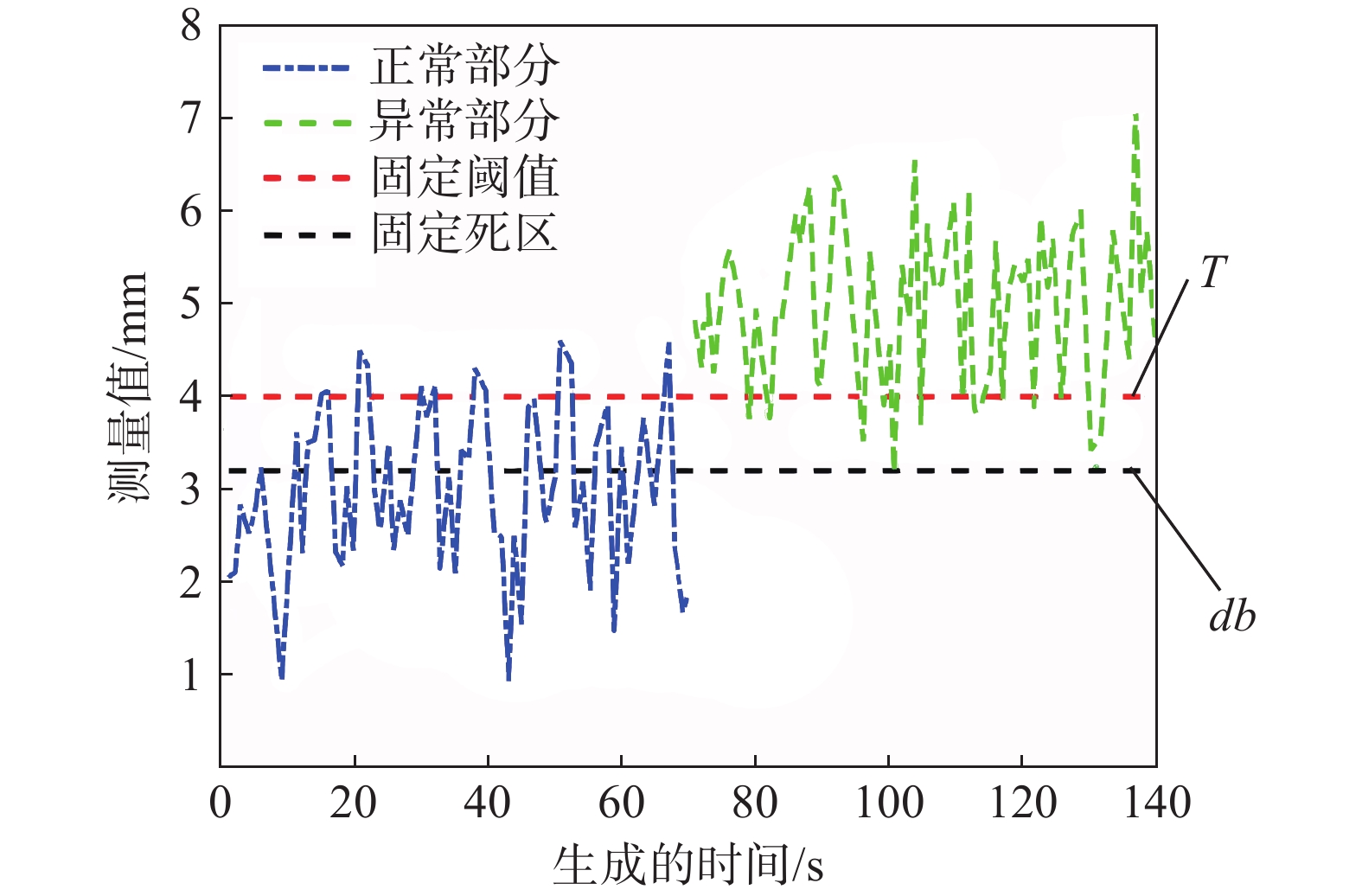
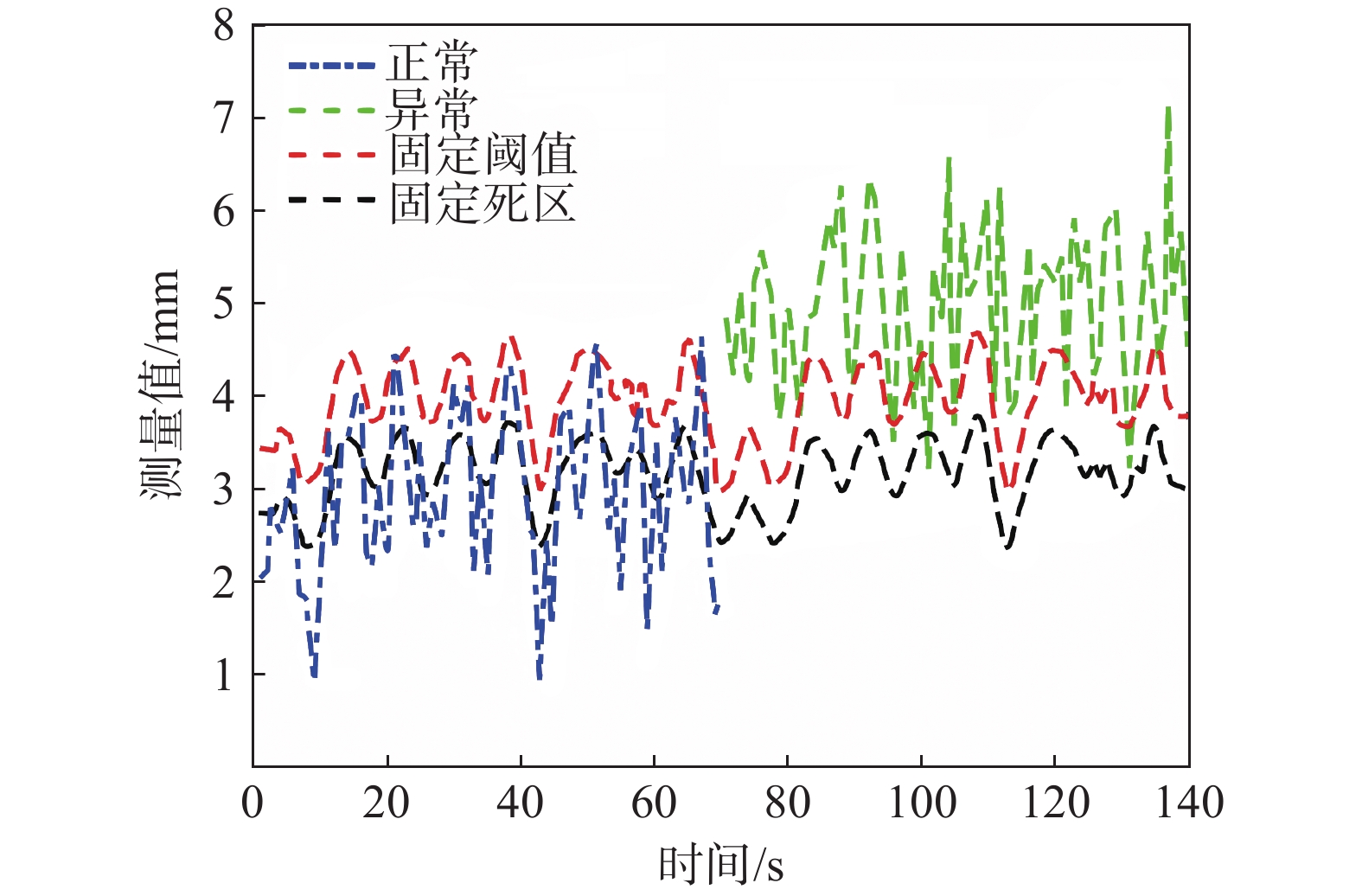
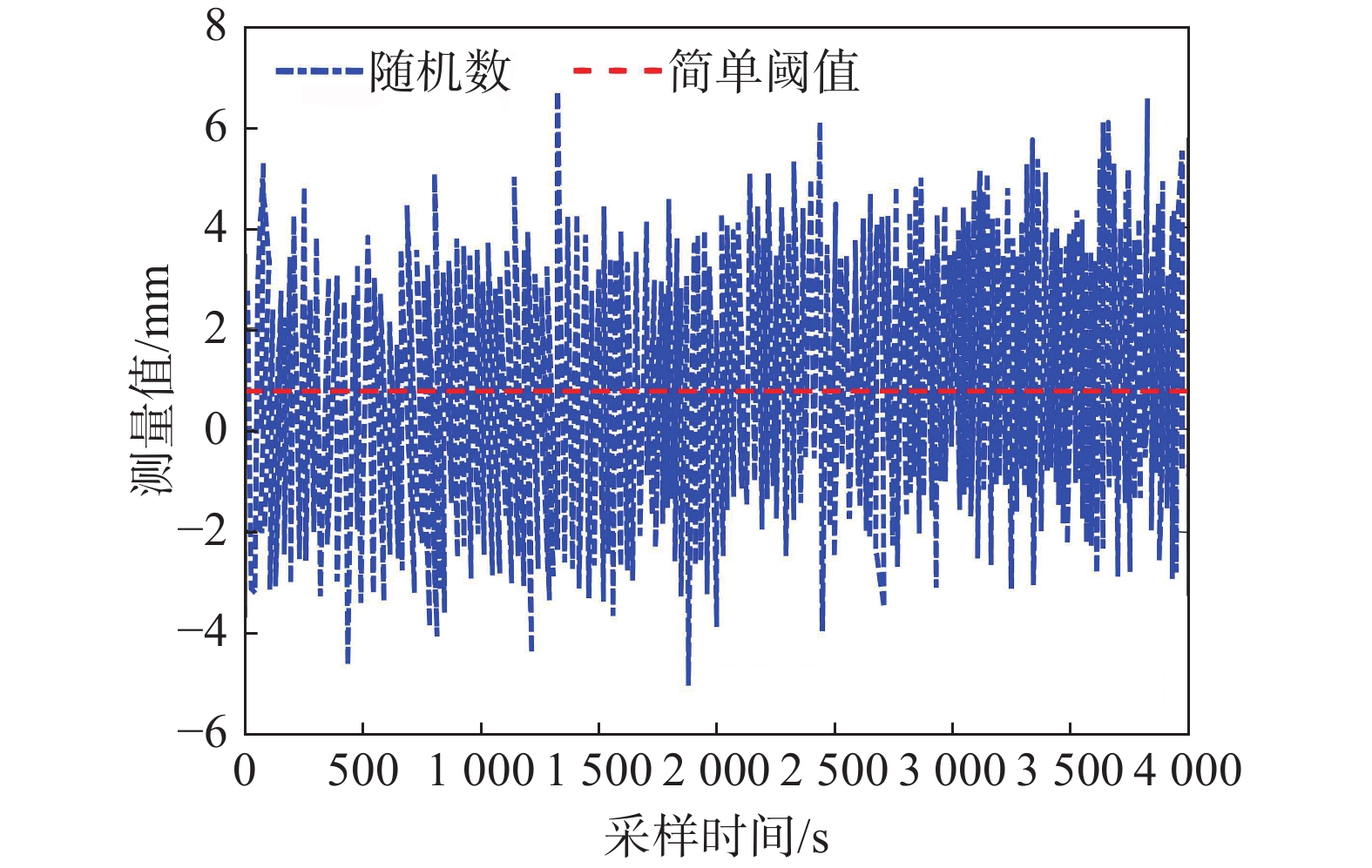
图 1 过程变量测量值的随机离散信号x(t)
Figure 1. Random discrete signal x(t) of process variable measured values
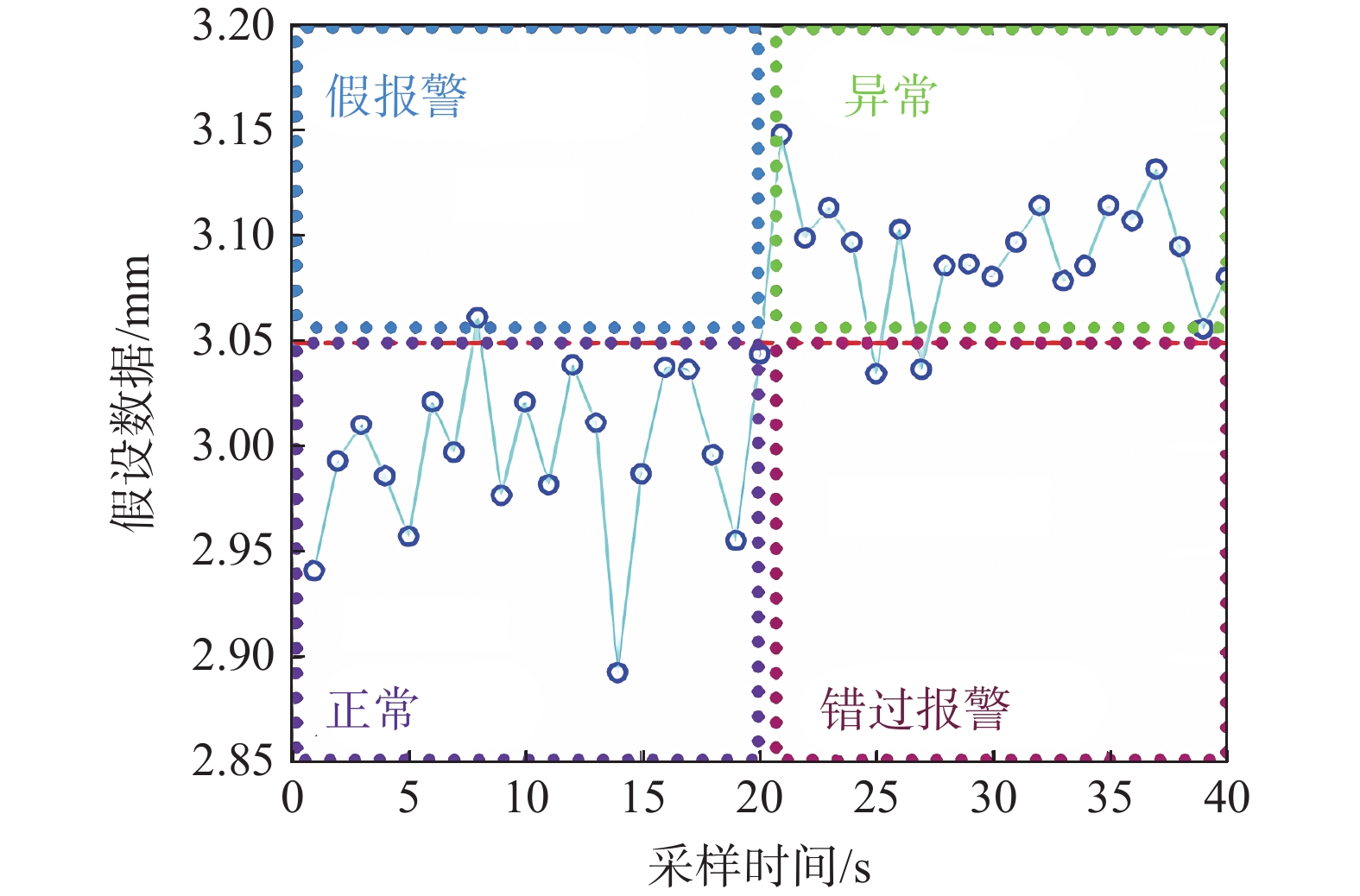
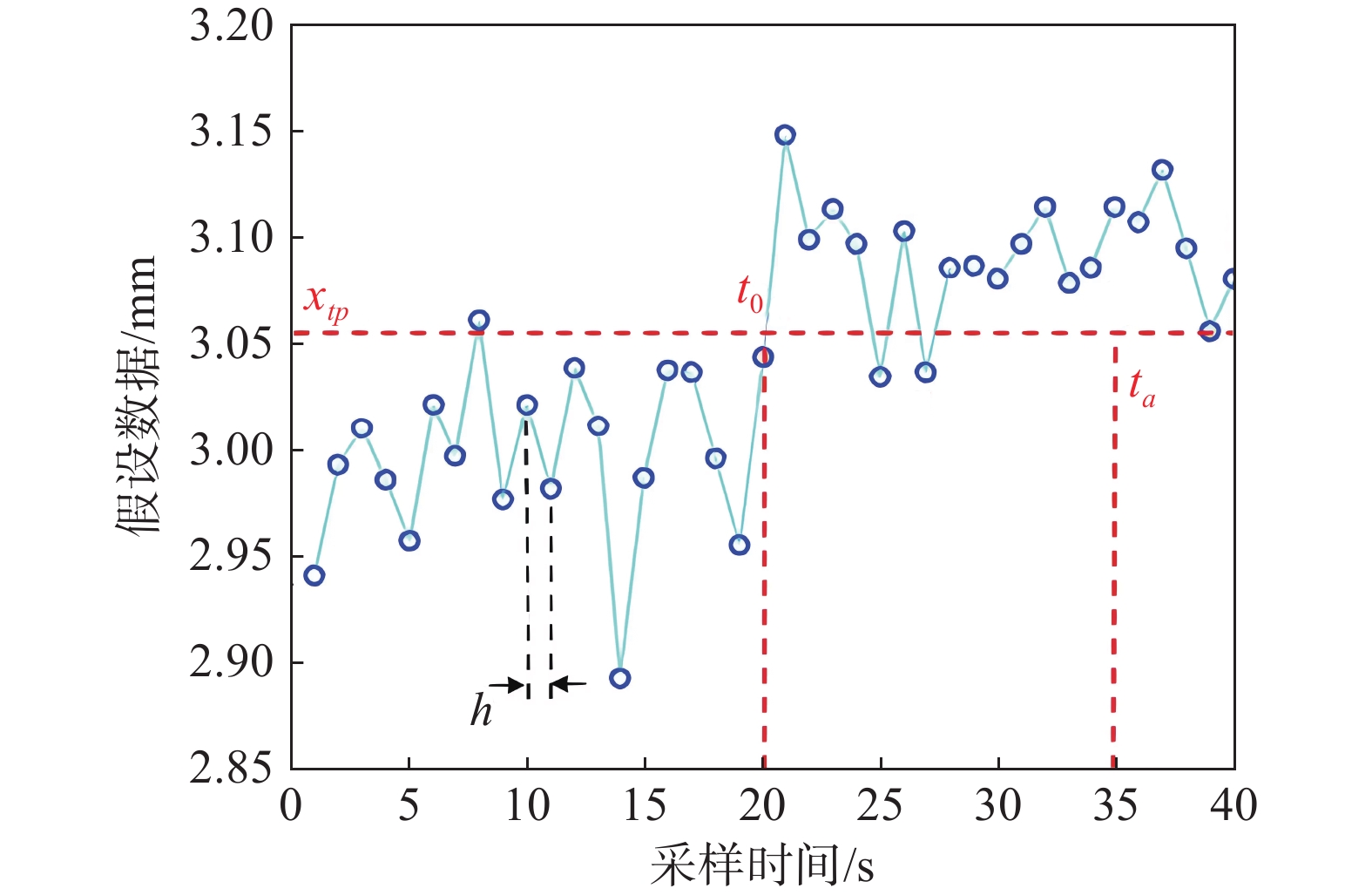
![]()
图 2 x(t)的正常、异常、假报警和错过报警部分分类
Figure 2. Classification of normal, abnormal, false alarm and missed alarm parts of x(t)
![]()
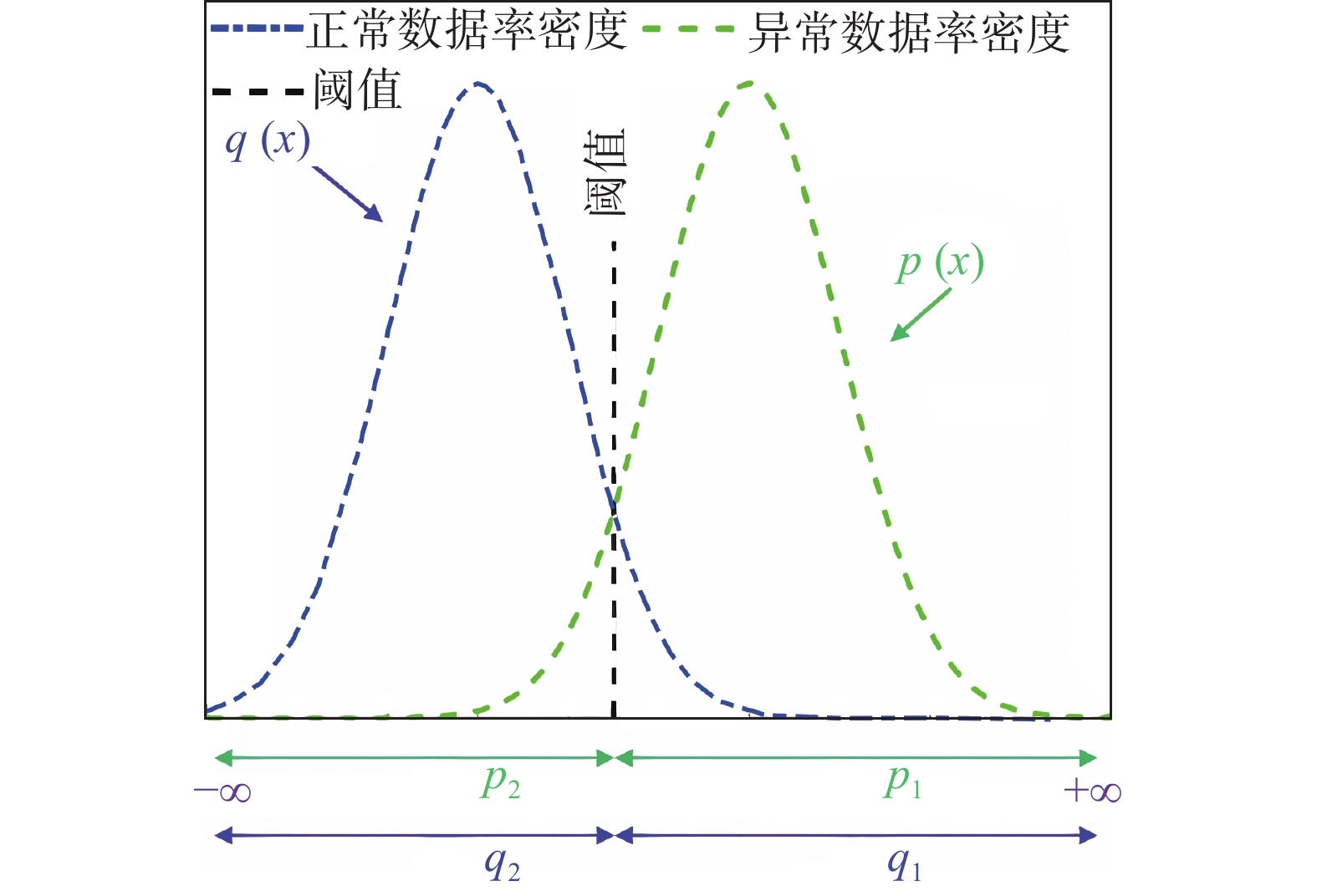
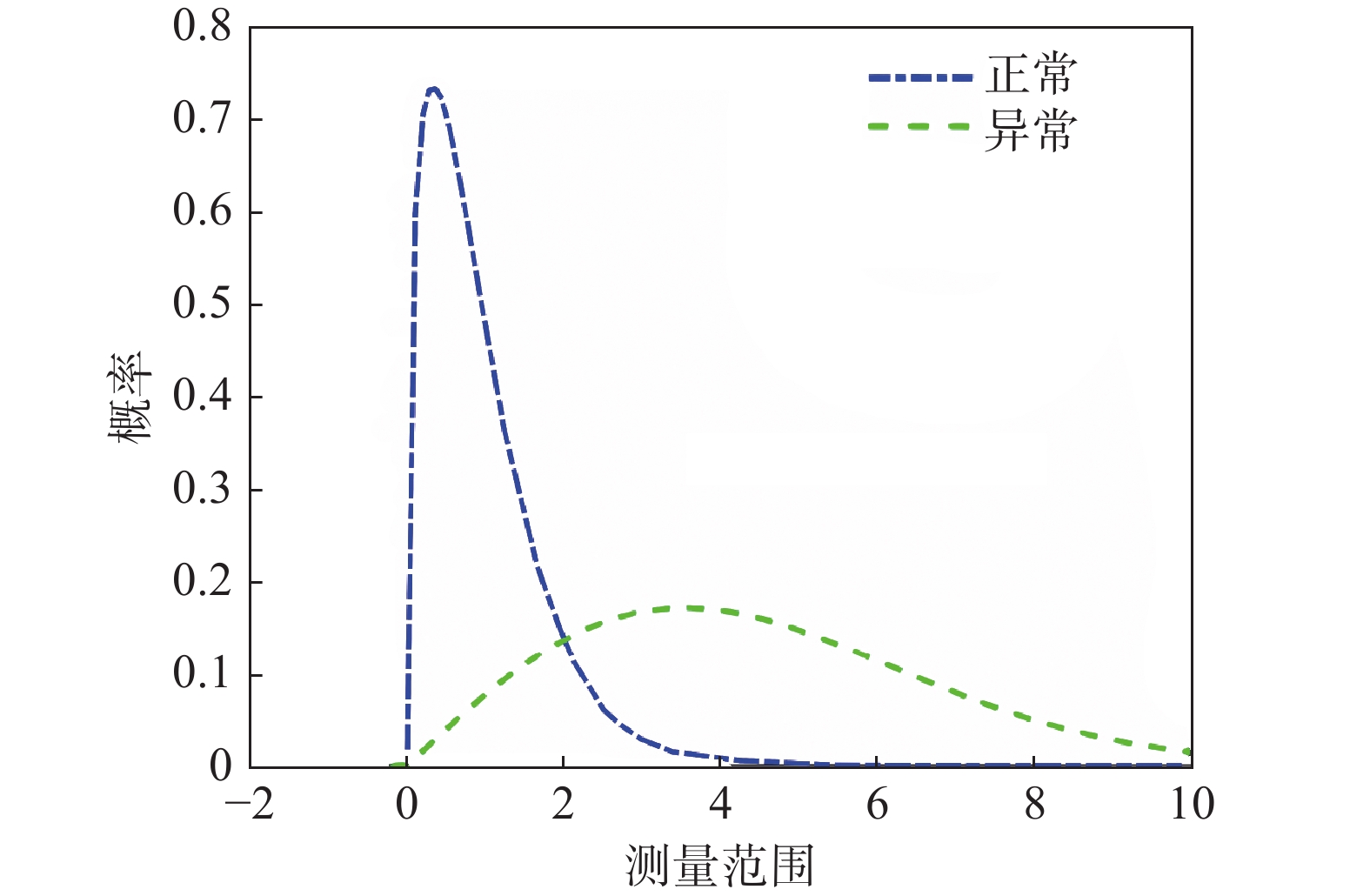
图 3 x(t)正常部分和异常部分的分离概率密度函数
Figure 3. Separation probability density function of x(t) normal part and abnormal part
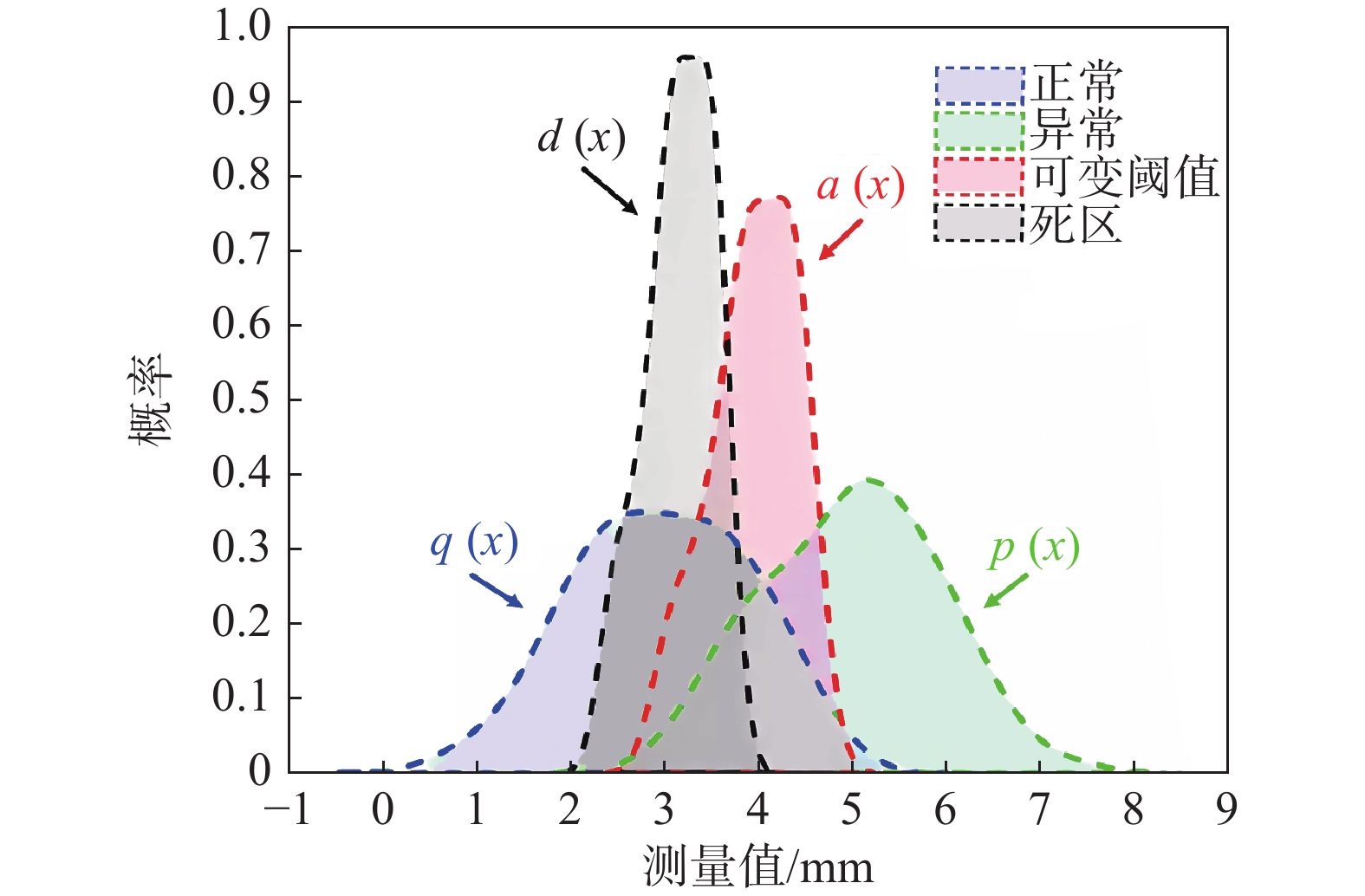
![]()
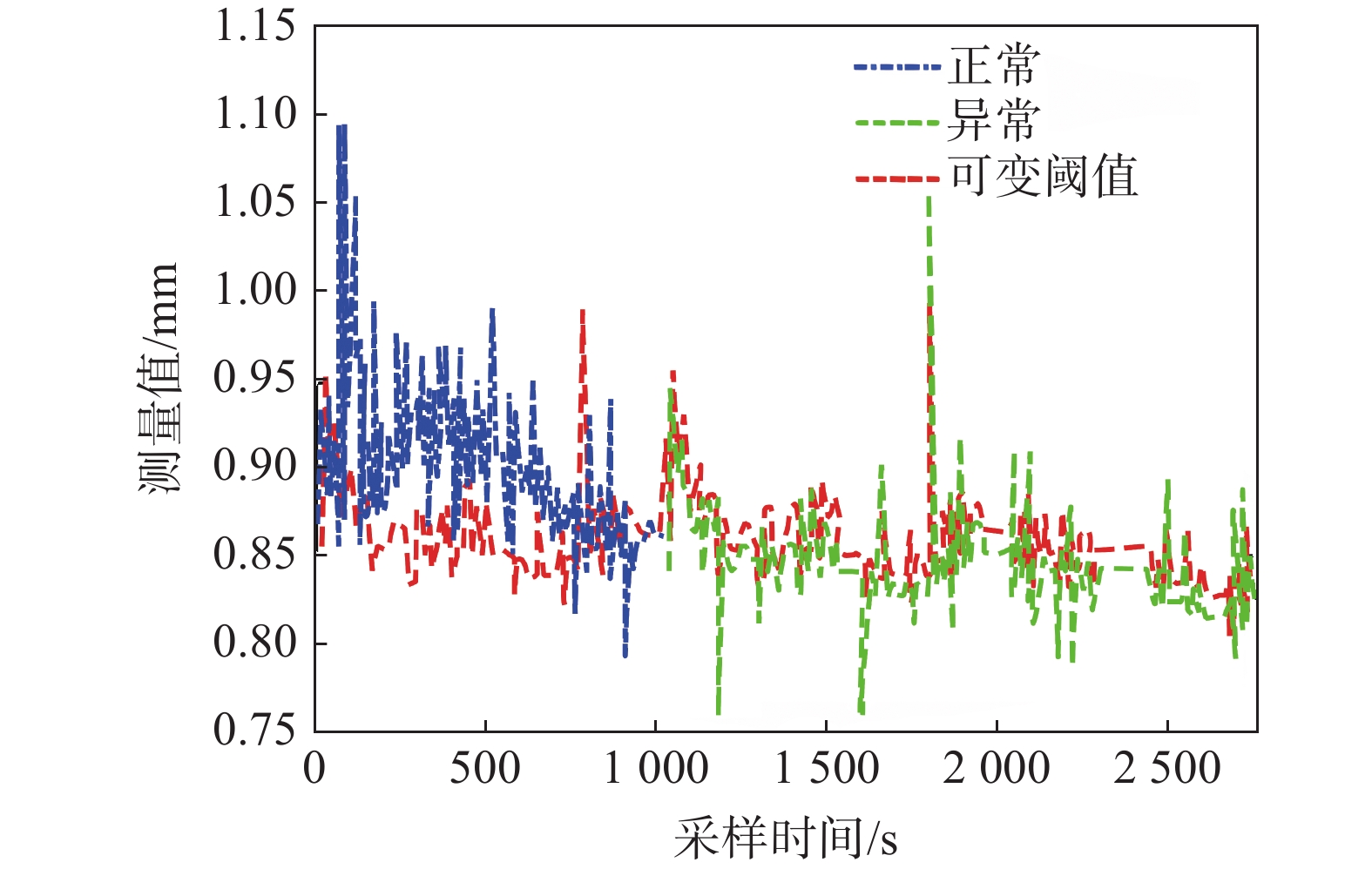
图 5 可变阈值a(x)、死区d(x)、正常q(x)和异常p(x)信号的估计概率密度函数
Figure 5. Estimated probability density function for variable thresholds, deadbands, normal and abnormal signals
![]()
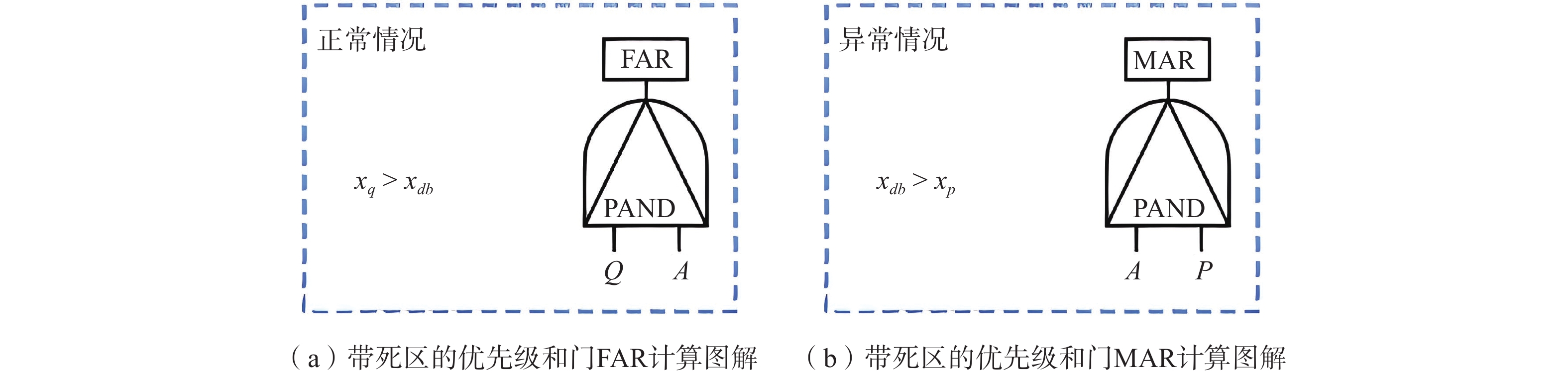
图 8 带死区的优先级和门计算图解
Figure 8. Calculation diagrams for a priority and gate with deadband
![]()
图 9 测量的概率密度函数(威布尔分布)
Figure 9. Probability density function (Weibull distribution) of measurements
![]()
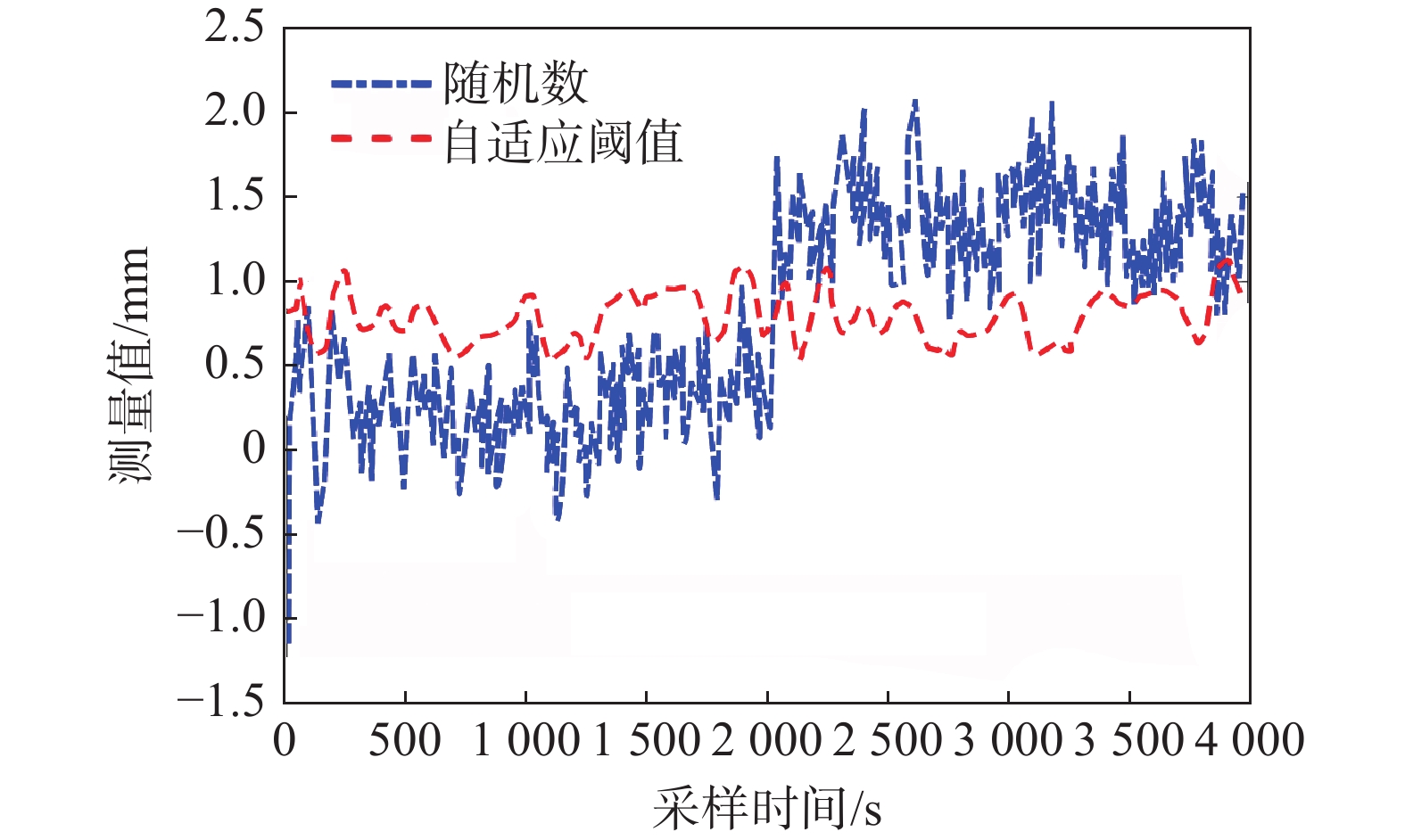
图 11 使用具有自适应阈值的EWMA过滤器(alpha=0.5,窗口大小=100)后生成的随机数
Figure 11. Generated random numbers after filtering with an EWMA filter (alpha=0.5, window size =100) with adaptive threshold
![]()
图 12 用自适应阈值(α=20)测量传感器(时间(s)-振动测量x(t) mm/s)
Figure 12. Measuring sensors with adaptive threshold (α = 20)
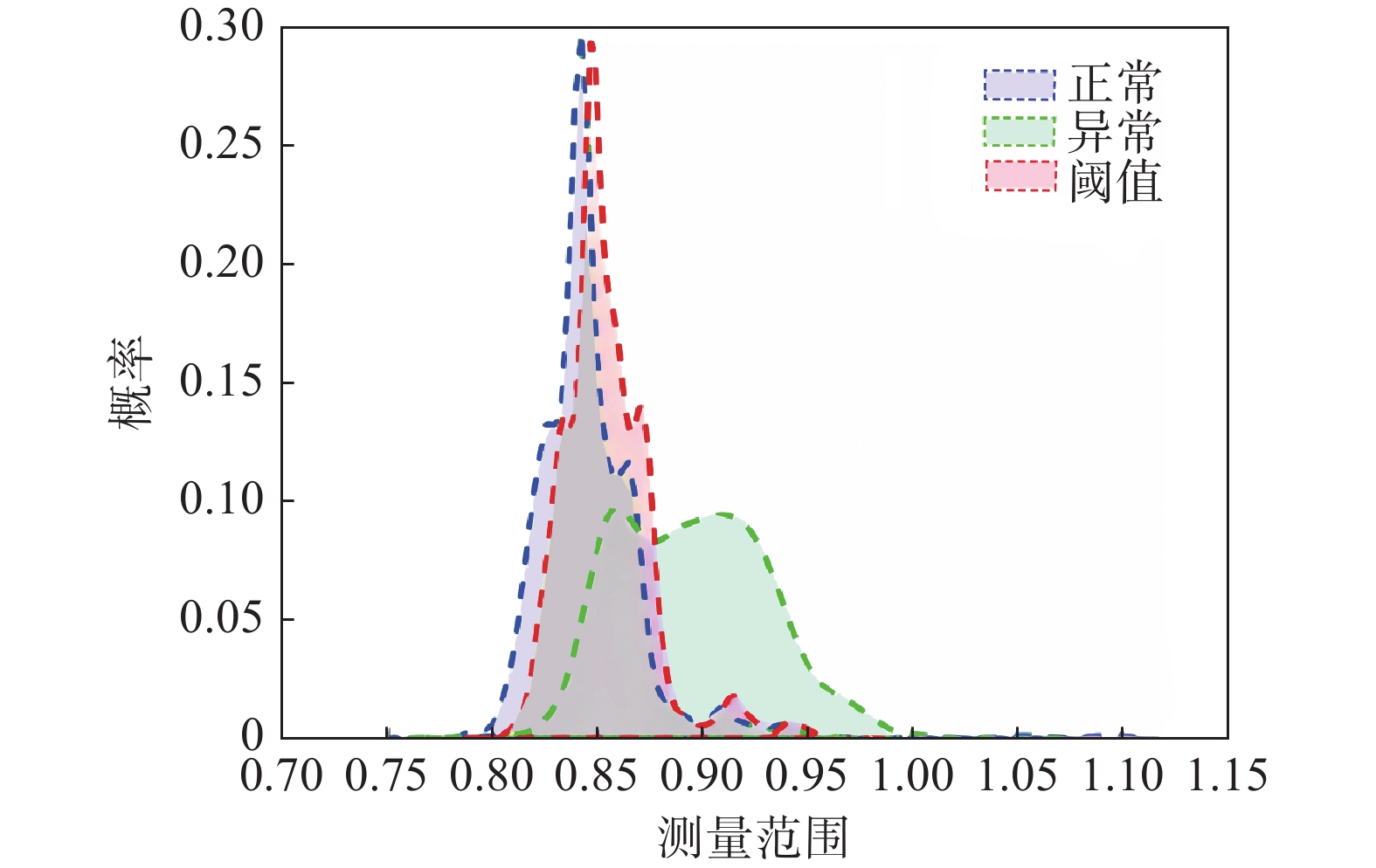
![]()
图 13 传感器在正常和异常情况下的概率密度函数(测量范围-概率)
Figure 13. Probability density function of sensor under normal and abnormal conditions
表 1 可变阈值报警系统的结果
Table 1 Results of variable threshold alarm system
方法 固定阈值 固定阈值和死区 可变阈值 可变阈值和死区 指标 FAR 0.2668 0.2668 0.2009 0.2009 MAR 0.2036 0.0452 0.1836 0.0448  下载: 导出CSV
下载: 导出CSV
表 2 蒙特卡罗模拟与VTAS方法的比较
Table 2 Comparison between Monte Carlo simulation and VTAS
方法 蒙特卡罗模拟 VTAS的解 指标 FAR 0.159852 0.15867 MAR 0.159856 0.15867
下载: 导出CSV
表 3 所提出的解、蒙特卡罗结果和简单马尔可夫解之间的比较
Table 3 Comparison between the proposed solution, Monte Carlo results and simple Markov solutions
方法 VTAS的解 蒙特卡罗结果 简单马尔可夫解 指标 FAR 0.1371 0.1371 0.1455 MAR 0.1371 0.1070
下载: 导出CSV
表 4 可变阈值与其他方法性能指标的比较结果
Table 4 Comparison results of performance metrics of variable threshold method with other methods
方法 ST VTAS EWMA VTAS
(+EWMA filter)Evidence-based alarm
system3OMAF 3SADT 指标 MAR 0.3519 0.3118 0.0437 0.0518 0.0582 0.2470 0.1511 FAR 0.3806 0.2860 0.0447 0.0241 0.0429 0.2926 0.2527
下载: 导出CSV
表 5 不同方法性能指标的比较结果
Table 5 Comparison results of different methods’performance metrics
方法 固定阈值 可变阈值(带死区) 固定阈值(带死区) 指标 FAR 0.192783 0.289527 0.228910 MAR 0.460713 0.207569 0.364654
下载: 导出CSV
表 6 用遗传算法优化VTAS
Table 6 Optimizing VTAS with genetic algorithm
遗传算法中损失函数的权重 报警系统参数
(α, ω, n, m)MAR FAR AAD ω3 ω2 ω1 (25.024, 82, 1, 1) 0.2109 0.2282 1.2674 1 1 10 IRAAD IRFAR IRMAR 1 1e−05 1e−05 ω3 ω2 ω1 (25.039, 82, 2, 3) 0.0556 0.1681 2.8742 100 0.1 0.1 IRAAD IRFAR IRMAR 1 1e−03 1e−03 ω3 ω2 ω1 (25.680, 83, 2, 3) 0.0596 0.1625 2.8979 100 0.5 0.1 IRAAD IRFAR IRMAR 1 1e−03 1e−03
下载: 导出CSV
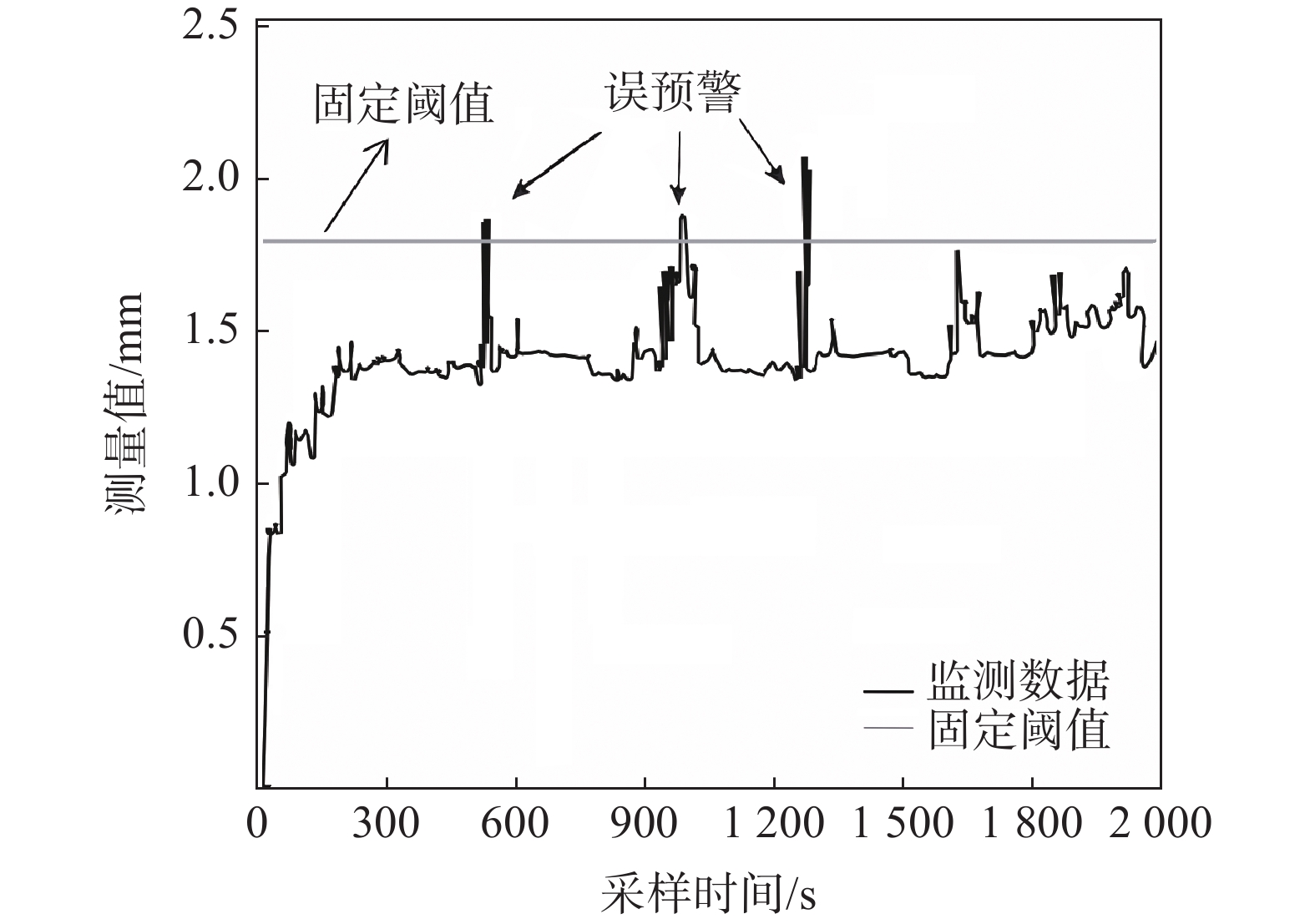
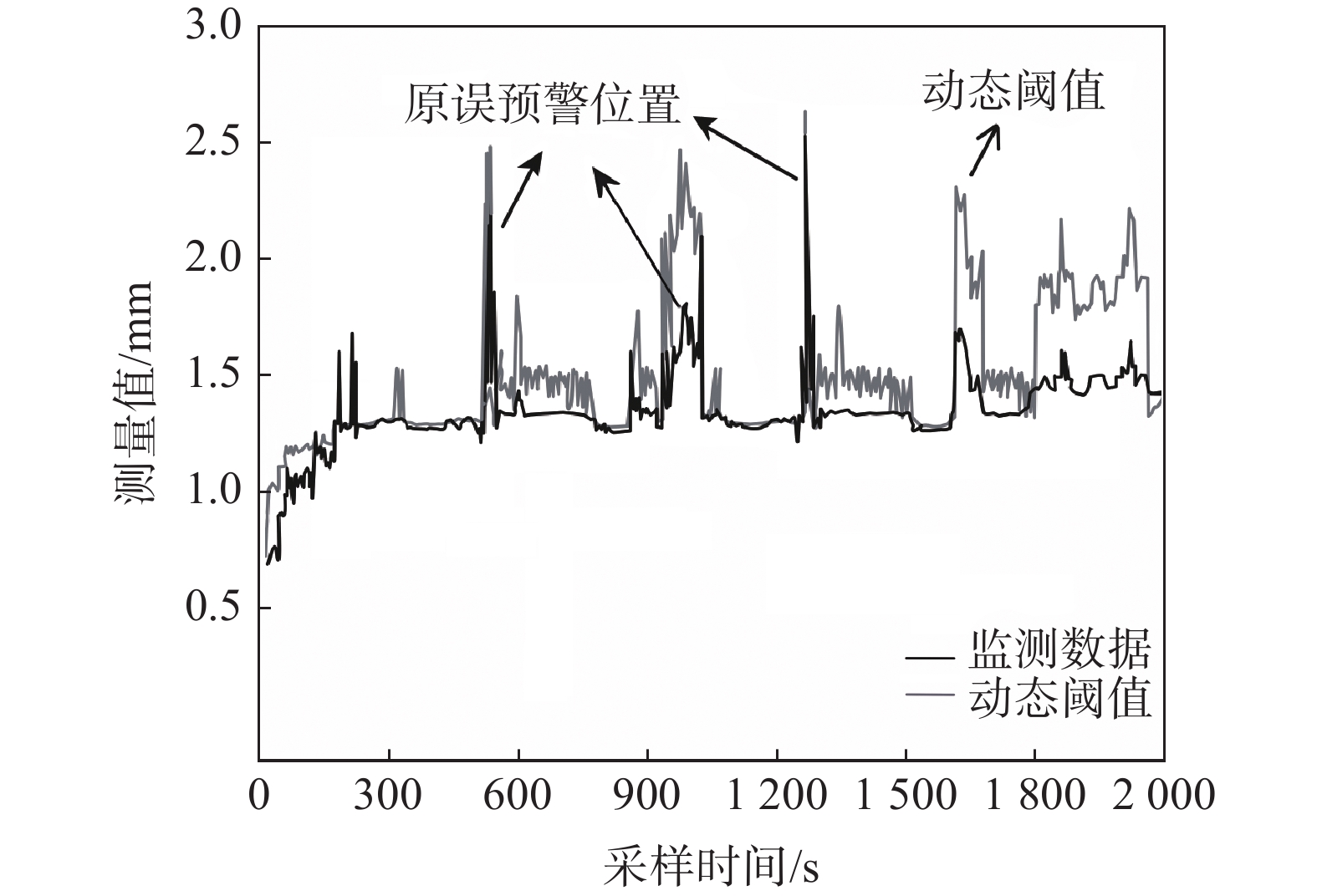
表 8 预警性能指标对比
Table 8 Comparison of early warning performance indicators
方法 MAR FAR 固定阈值 0.0830 0.137 可变阈值(带死区) 0.0007 0.013
下载: 导出CSV
-
[1] IZADI S L, SHAH D S, SHOOK S R, et al. A framework for optimal design of alarm systems[C]//Proceedings of the 7th IFAC SAFEPROCESS, 2009.
[2] NAGHOOSI E, IZADI I, CHEN T W. A study on the relation between alarm deadbands and optimal alarm limits[C]//Proceedings of the 2011 American Control Conference. June 29 - July 1, 2011, San Francisco, CA, USA. IEEE, 2011: 3627 − 3632.
[3] XU J. Performance assessment and design for univariate alarm systems based on FAR,MAR,and AAD[J]. IEEE Transactions on Automation Science and Engineering,2012,9(2):296 − 307. DOI: 10.1109/TASE.2011.2176490
[4] NAGHOOSI E,IZADI I,CHEN T. Estimation of alarm chattering[J]. Journal of Process Control,2011,21(9):1243 − 1249. DOI: 10.1016/j.jprocont.2011.07.015
[5] YUE C, IZADI I. Tongwen optimal alarm signal processing: Filter design and performance analysis[J]. J. Automation Science and Engineering, 2013, 10(2): 446 − 451.
[6] ADNAN N A,CHENG Y,IZADI I,et al. Study of generalized delay-timers in alarm configuration[J]. Journal of Process Control,2013,23(3):382 − 395. DOI: 10.1016/j.jprocont.2012.12.013
[7] ADNAN N A,IZADI I,CHEN T W. On expected detection delays for alarm systems with deadbands and delay-timers[J]. Journal of Process Control,2011,21(9):1318 − 1331. DOI: 10.1016/j.jprocont.2011.06.019
[8] YANG Fan, SHAH Sirish L, XIAO Deyun. Correlation analysis of alarm data and alarm limit design for industrial processes[C]//Proceedings of the 2010 American Control Conference. June 30 - July 2, 2010, Baltimore, MD, USA. IEEE, 2010: 5850 − 5855.
[9] SHARMA V, et al. A critical review on the application and problems caused by false alarms[J]. Singapore, 2018, s. n.
[10] AL-DABBAGH A W,HU Wenkai,LAI Shiqi,et al. Toward the advancement of decision support tools for industrial facilities:Addressing operation metrics,visualization plots,and alarm floods[J]. IEEE Transactions on Automation Science and Engineering,2018,15:1883 − 1896. DOI: 10.1109/TASE.2018.2827309
[11] QUIÑONES-GRUEIRO M, PRIETO-MORENO A, VERDE C, et al. Data-driven monitoring of multimode continuous processes: A review[J]. Chemometr Intell Lab Syst 2019, 189(1): 56 – 71.
[12] HOLLIFIELD BR, HABIBI E, PINTO J. Alarm management: A comprehensive guide[J]. International Society of Automation (ISA), 2021, s. l.
[13] KONDAVEETI S R,SHAH S L,IZADI I. Application of multivariate statistics for efficient alarm generation[J]. IFAC Proceedings Volumes,2009,42(8):657 − 662. DOI: 10.3182/20090630-4-ES-2003.00109
[14] CHENG Y,IZADI I,CHEN T W. Optimal alarm signal processing:filter design and performance analysis[J]. IEEE Transactions on Automation Science and Engineering,2013,10(2):446 − 451. DOI: 10.1109/TASE.2012.2233472
[15] YANG H,LI H G. Optimization of process alarm thresholds:A multidimensional kernel density estimation approach[J]. Process Safety Progress,2014,33(3):292 − 298. DOI: 10.1002/prs.11658
[16] HAN Liu,GAO Huihui,XU Yuan,et al. Combining FAP,MAP and correlation analysis for multivariate alarm thresholds optimization in industrial process[J]. Journal of Loss Prevention in the Process Industries,2016,40:471 − 478. DOI: 10.1016/j.jlp.2016.01.022
[17] XU Xiaobin, LI Shibao, SONG Xiaojing, et al. The optimal design of industrial alarm systems based on evidence theory[J]. Control Eng Pract 2019, 46(1): 142 – 56.
[18] GAO Huihui, LIU Feifei, ZHU Qunxiong. A correlation consistency based multivariate alarm thresholds optimization approach[J]. ISA Transactions, Volume 65, 2016: 37 − 43.
[19] BAHAR-GOGANI M, ASLANSEFAT K, SHOOREHDELI M A. A novel extended adaptive thresholding for industrial alarm systems[C]//2017 Iranian Conference on Electrical Engineering (ICEE). May 2-4, 2017. Tehran, Iran. IEEE, 2017.
-
期刊类型引用(8)
1. 韩长玉,陈文超,张敏,金莉,王喆,杨振兴. 考虑颗粒形态的滑坡体运移特征研究. 水文地质工程地质. 2025(03): 234-244 .  百度学术
百度学术
2. 涂正楠,冯君,邓应进,潘激扬. 四川甘洛县比依市村滑坡运动特征分析. 中国地质灾害与防治学报. 2024(01): 92-99 . 本站查看
3. 田仁珺. 基于PFC3D的庞家湾滑坡运动过程模拟研究. 江西建材. 2024(06): 205-209 . 百度学术
4. 陶泽,孙闯,金淳哲,刘晓龙,李东. 抚顺西露天矿弱层强度衰减特性及边坡滑移大变形规律. 中国地质灾害与防治学报. 2023(03): 31-39 . 本站查看
5. 朱远乐,王淇萱,廖文景,赵新勇. 基于PFC3D磷石膏尾矿库溃坝数值模拟研究. 工业安全与环保. 2023(08): 24-28 . 百度学术
6. 孙立娟,沈方铭,张互助. 基于滑带土强度劣化的库水复活型滑坡渐进失稳机理研究. 吉林建筑大学学报. 2022(04): 18-22+28 . 百度学术
7. 孔祥曌,李滨,贺凯,罗浩,常文斌,邢爱国. 柱状岩体崩塌动力特征与破碎规律——以重庆甑子岩崩塌为例. 中国地质灾害与防治学报. 2022(05): 1-10 . 本站查看
8. 朱志男,李慧亭,陈羽,刘太辉,成昊凌. 基于PFC-Geostudio耦合的边坡降雨变形破坏研究. 河北工程大学学报(自然科学版). 2022(04): 92-99+112 . 百度学术
其他类型引用(10)










计量
- 文章访问数: 1561
- HTML全文浏览量: 996
- PDF下载量: 310
- 被引次数: 18
 邮件订阅
邮件订阅 RSS
RSS